

|
9-DOF 낙하산 모델링 및 선회비행 시뮬레이션 검증 |
|
이상종, 민병문* 인하공업전문대학 항공기계과
|
|
9-DOF Modeling and Turning Flight Simulation Evaluation for Parachute |
|
Sang-Jong Lee, Byoung-Mun Min* Department of Aircraft Mechanical Engineering, Inha Technical College |
|
요 약 본 논문에서는 현재 고고도 이탈 및 저고도 개산강하(HALO, High Altitude Low Opening)용으로 사용하고 있는 군용 낙하산의 훈련 시뮬레이터 개발을 위해 필요한 낙하산 모델링 및 시뮬레이션 결과를 정리하였다. 대상인 군용 낙하산은 파라포일(Parafoil) 형태의 사각 낙하산으로 원형 낙하산과는 달리 강하자가 조종을 통해 원하는 위치로 유도할 수 있는 기동성이 뛰어나 공수부대원들의 적진 침투시에 주로 이용된다. 실재 낙하산의 형상자료를 이용하여 파라포일과 낙하물의 질점 모델을 기반으로 9-자유도 비선형 운동방정식을 유도하고, 각각의 관성모멘트와 공력 미계수를 산출하여 MATLAB/Simulink 기반의 비선형 시뮬레이션을 수행하여 그 결과를 나타내었다. 특히 낙하산과 같은 공기부양(LTA, Lighter-Than-Air) 비행체는 일반적인 항공기 비선형 운동과 달리 부가질량(Added Mass) 및 부가 관성모멘트(Added Moment of Inertia)의 효과가 크기 때문에 이에 대한 경험수식을 바탕으로 동역학 모델링에 포함하여 고려하였다. 수행된 낙하산 운동 모델링의 검증을 위해 비대칭 조종입력을 통한 나선형 강하 비행조건을 시뮬레이션하여 대상 군용 낙하산에서 제시된 실재 성능값과 시뮬레이션 결과치를 비교하여 유도된 운동모델이 타당함을 검증하고 그 결과를 나타내었다.
|
|
Abstract This paper describes the parachute dynamics modeling and simulation results for the development of training simulator of a HALO (High Altitude Low Opening) parachute, which is currently in use for military purposes. The target parachute is a rectangular shaped parafoil and its dynamic model is derived based on the real geometry data as the 9-DOF nonlinear equations of dynamics. The simulation was conducted through the moment of inertia and its aerodynamic derivatives to reflect the real characteristics based on the MATLAB/Simulink. In particular, its modeling includes the typical characteristics of the added mass and moment of inertia, which is shown in the strong effects in Lighter-Than-Air(LTA) flight vehicle. The proposed dynamic modeling was evaluated through the simulation under the spiral turning flight conditions of the asymmetric control inputs and compared with the performance index in the target parachute manual.
Keywords : Parachute, Parafoil dynamics, Parachute modeling, Training simulator, Model based simulation |
1. 서론
낙하산(Parachute)은 공중에서 사람이나 물체의 낙하속도를 줄여 지상으로 안전하게 낙하시키기 위하여 사용되고 있으며, 이외에도 고속 전투기의 착륙거리를 줄이기 위한 Drag-chute로도 사용되며, 최근에는 조종이 불가능한 상태의 무인 비행체의 비상상황에서 비행체의 안전한 회수 및 착륙을 위하여 사용되기도 한다[1]. 낙하산의 형태는 Fig. 1과 같이 조종성이 낮아 목표지점에 대한 유도가 어려운 Drag 개념의 원형 낙하산과 강하자가 조종을 통해 원하는 위치로 유도할 수 있는 파라포일(Parafoil) 형태의 Ram-air 낙하산으로 크게 구분된다. 파라포일 형태의 Ram-air 낙하산은 낙하산의 형상이 일반 비행기의 날개와 같은 에이포일(Airfoil) 형태로 이루어져 있어 날개 후면부를 변형하거나 일부분을 위아래로 변화시켜 낙하산에서 발생하는 외부 공기흐름에 의한 양력(Lift)과 항력(Drag)을 적절히 변화시켜 원하는 목표위치로 낙하산을 조종할 수 있다. 특히 공수부대원들의 적진 침투시에 고고도 이탈 및 저고도 개산강하(HALO, High Altitude Low Opening)용 낙하산으로 이용된다.
본 논문에서는 공수부대원들의 훈련용 시뮬레이터(Training Simulator) 개발을 위해 요구되는 파라포일 형태의 낙하산 운동모델링과 이에 대한 시뮬레이션을 다루고 있다. 실재 운용중인 군용 낙하산의 현실감 있는 동특성 모사를 위해 파라포일 형태의 낙하산의 형상자료를 기반으로 외부 힘과 모멘트를 산출하고, 낙하산 조종입력에 대한 여러 비행조건에 대해 시뮬레이션을 수행하였다. 특히 공기보다 가벼운 비행체에서 독특하게 나타나는 부가질량(Added Mass) 및 부가관성모멘트(Added moment of Inertia)를 고려한 9-자유도(DOF) 비선형 모델링을 수행하였다. 제시된 운동모델링의 검증을 위하여 나선강하 및 대칭, 비대칭 조종입력을 통하여 실재 낙하산에서 제시된 성능값과의 비교를 수행하여 유효성을 검증하였다.
Fig. 1. Parachute (circular and ram-air type)
2. 낙하산 운동모델링
2.1 운동좌표계의 정의
낙하산은 Fig. 1과 같이 파라포일과 강하자(또는 낙하물)로 구성되며, C점에서 구속된다고 가정한다 [2].
좌표계는 파라포일 좌표계(xp,yp,zp)와 낙하물(payload)의 좌표계(xb,yb,zb)로 정의하며, 관성좌표계(xe,ye,ze)를 기준으로 운동방정식을 유도한다.
2.2 낙하산 운동방정식
운동 방정식은 지구고정 관성좌표계에 대하여 자세를 나타내는 Eq.(1)의 자세 방정식(Kinematics Equation)과 위치를 표시하기 위한 Eq.(2)의 항법방정식(Navigation Equation)으로 구성된다. 자세 방정식은 오일러 각(Euler Angle) 대신 쿼터니언(Quaternion)을 이용하여 유도하였다.
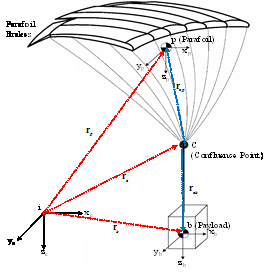
Fig. 2. Coordinate system of parachute
(1)
(2)
여기서, 은 항법좌표계에서 지구고정좌표계로의 좌표변환 행렬(Transformation Matrix)이고, rc와 vc는 Fig.1에서 정의된 지구고정좌표에서 접속점 C까지의 위치벡터와 속도벡터를 나타낸다. 와는 각각 파라포일과 낙하물의 쿼터니언과 각속도(Angular Rate)를 나타내며, 밑첨자 b는 낙하물을 지칭하고 p는 파라포일을 지칭한다.
(3)
(4)
파라포일과 낙하물에 대한 힘 방정식(Force Equation)은 Eq.(3)으로, 모멘트 방정식(Moment Equation)은 Eq.(4)로 각각 정리되며, 참고문헌 [2] [3], [4]를 참고하였다. 여기서, m은 질량을 Jb는 관성모멘트를 나타내고, Fgrav, Faero는 파라포일과 낙하물에 가해지는 중력과 공기역학적 힘을 지칭하며, Maero는 공기역학적 모멘트를 나타낸다. 접합점 C에서의 구속 힘과 모멘트는 Fc와 Mc로 표현하였으며, 와 는 접합점 C에서 파라포일과 낙하물의 무게중심까지의 거리벡터의 cross product 행렬을, 와 는 파라포일과 낙하물의 각속도 벡터의 Cross Product 행렬을 지칭한다.
(5)
(6)
부가질량과 부가 관성모멘트는 각각 와 로 나타내며, 관성좌표계에서 파라포일 및 낙하물 사이의 좌표변환 행렬은 다음과 같다.
(7)
3. 낙하산 형상자료
3.1 대상 낙하산 형상 및 제원
본 논문에서 대상으로 하는 군용 낙하산은 현재 미군 및 한국군에서 사용되고 있는 고공강하용 MC-4 낙하산으로 Fig. 3과 같은 형상을 가진다. 파라포일 형상 변수는 Fig. 4와 같이 정의되며, 제원은 참고문헌 [5]에서 제시된 자료를 이용하여 다음 Table 1에 정리하였다.
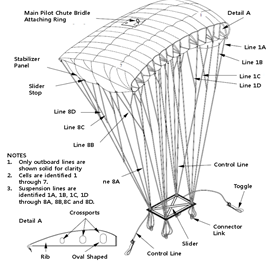
Fig. 3. MC-4 parachute configuration
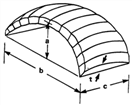
Fig. 4. Geometric definition of parachute
Table 1. Geometric data of parachute
|
Parameter |
Value |
Parameter |
Value |
|
parafoil chord (c) |
3.96m |
parafoil weight (mp) |
6.36 kg |
|
parafoil thickness (t) |
0.53m |
payload weight (mb) |
145 kg |
|
parafoil height (a) |
1.1 m |
payload length (ℓx) |
1.5 m |
|
parafoil span (b) |
8.7m |
payload width (ℓy) |
0.4 m |
|
length of control line (l) |
5.3m |
payload height (ℓz) |
0.3 m |
부가질량과 부가 관성모멘트 와 는 비행상태에서 외부 공기흐름에 대한 파라포일 내에 채워지는 공기의 상대적인 운동특성을 좌우하며 파라포일 자체의 질량과 관성모멘트를 증가시키는 효과를 통해 동특성에 크게 영향을 미친다. 본 논문에서는 다음과 같이 경험수식을 이용하였다[6].
(8)
3.2 낙하산 조종입력
낙하산의 조종은 좌/우측 산줄(Control Line)을 잡아당겨 파라포일 후면부의 형상을 변화시킴으로써 발생되는 양력과 항력의 차를 이용한다. 조종입력은 좌/우측 산줄을 동시에 잡아당기는 대칭 입력(Symmetric Input, ds)과 좌/우측 변위차가 나게 잡아당기는 비대칭 입력(Asymmetric Input, da)으로 구성되며, 0인 경우 Zero Brake, 0.5는 Half Brake, 1.0은 Full Brake로 정의한다. 본 논문에서는 da=+1이면 우선회(Right Turn)를 da=-1이면 좌선회(Left Turn)를 하도록 정의하여 사용하였다.
(9)
4. 시뮬레이션 결과
4.1 시뮬레이션 비행조건
앞절에서 유도된 낙하산 운동모델의 물리적 타당성을 검증하기 위하여 비대칭 조종입력을 통한 선회 비행조건과 대칭 조종입력을 통한 전진비행 조건에 대한 시뮬레이션을 수행하고, 각 시뮬레이션 결과는 MC-4 낙하산의 매뉴얼에 제시된 성능값들과 비교하여 유효성을 검증하였다. 낙하산의 초기 속도는 0 m/s, 하강 시작 고도는 5,000 m로 설정하고, 동쪽(90deg) 방향으로 비행한다. 시뮬레이션 비행조건은 Table 2에 정리하였는데, Case 1은 낙하산 전개 후 평형상태에 도달한 후 조종입력 없이 비행하는 경우이며, Case 2는 전개 후 20초 도달시간에 좌선회 비행을 위해 비대칭입력을 Half Brake로 1/2만 사용한 경우이고, 마지막 Case 3는 좌선회 비행을 위해 Full Brake 입력을 가한 경우이다.
Table 2. Simulation cases
|
No. |
Flight |
ds |
da |
|
Case 1 |
base |
0 |
0 |
|
Case 2 |
turn flight |
0 |
-0.5(Half Brake) |
|
Case 3 |
turn flight |
0 |
-1.0(Full Brake) |
4.2 선회 시뮬레이션 결과
3가지 비행조건에서의 낙하산 대칭 및 비대칭 조종입력은 Fig. 5와 같이 하강 후 20초 후에 좌측 산줄입력을 입력하였고, 2차원, 3차원 궤적 결과는 Fig. 6과 7에 나타내었다.
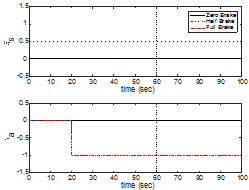
Fig. 5. Simulation control inputs
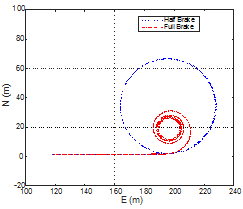
Fig. 6. 2-D Trajectory result
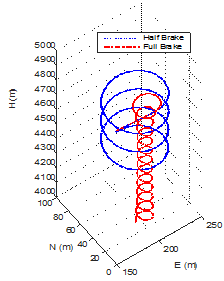
Fig. 7. 3-D Trajectory result
궤적결과에서 보여진 바와 같이 비대칭 조종입력이 클수록 선회반경이 작아지게 되는데 Half Brake 입력은 약 35m 정도이며, Full Brake 입력의 경우는 5m 정도로 나타났다. 선회반경이 작아지면 하강률(Rate of Descent)이 증가하게 되어, 같은 시간동안 빠르게 하강하게 된다. 이는 고도결과를 나타낸 Fig. 8과 9에서도 확인할 수 있으며, Full Brake 입력에서 강하율이 가장 크게 나타남으로써 MC-4 매뉴얼 [5,7]에서 제시된 실재 낙하산의 운동특성과 동일한 특성을 나타냄으로 제시된 운동모델링이 유효함을 판단할 수 있다. 즉, Brake 입력값이 클수록 조종값이 입력된 파라포일 쪽에서 양항력이 커지게 되고, 비대칭 롤링 모멘트가 커지게 되므로 선회율이 빨라지며 고도강하가 빠르게 일어나는 운동특성이 나타나게 된다.
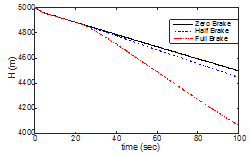
Fig. 8. Rate of descent result
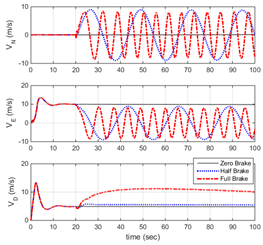
Fig. 9. Velocity result
Fig. 9의 속도 결과를 보면 낙하산 전개 후 도달하는 평형상태(trim)에서의 속도는 전진방향으로 약 10 m/s이고 하강속도는 약 5 m/s로 나타나 매뉴얼의 실제값과 비슷한 비행결과를 나타내었다. 운동 모델 검증을 위한 마지막 항목은 선회율(Rate of Turn) 항목으로 MC-4 메뉴얼에서 제시된 실재 낙하산의 선회비행성능은 Full Brake를 사용시 360도 회전에 약 3~10 초 정도가 소요된다고 제시되어 있으며, Fig. 10에 나타낸 요각 변화율을 보면 이를 만족시킴을 알 수 있어 제시된 운동모델링이 유효함을 판단할 수 있다. 매뉴얼과 시뮬레이션 결과와의 비교는 다음 Table 3에 나타내었다.
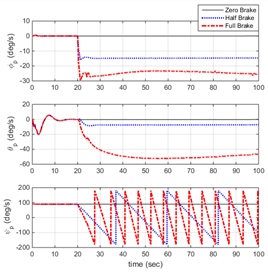
Fig. 10. Attitude result
Table 3. Simulation evaluation
|
Item |
Manual |
Simulation |
Evaluation |
|
Forward Speed |
8.9∼13 m/s |
9.9 m/s |
suitable |
|
Rate of Descent |
4.3∼4.9 m/s |
4.9 m/s |
suitable |
|
Time for 360 deg turn |
3∼10 sec |
6.1∼7.2 sec |
suitable |
5. 결론
본 논문의 연구결과를 정리하면 다음과 같다.
(1) 파라포일과 낙하물로 이루어진 Ram-air 낙하산의 9-자유도 운동모델을 정리하였다.
(2) 실재 군용 낙하산으로 사용되고 있는 MC-4 낙하산의 형상자료를 바탕으로 좌선회 나선강하 시뮬레이션을 수행하고 결과를 나타내었다.
(3) 좌선회 비행결과를 통해 조종입력이 클수록 선회율과 고도 강하율이 증가하는 유효한 운동특성을 나타내었다.
(4) 시뮬레이션 결과와 해당 군용 낙하산의 매뉴얼에 제시된 실재값의 비교를 통해 해당 모델링이 유효함을 검증하였다.
추후 연구계획은 낙하산 대칭입력에 대한 전진방향 시뮬레이션을 수행하고 동일한 방법으로 군용 낙하산 매뉴얼에 명시된 성능값과의 비교를 통하여 운동 모델링을 검증한 후, 낙하물을 강하자로 가정하여 낙하산 전개 전에 낙하고도에서 떨어져 자유낙하하는 강하자의 모델링과 자유낙하 시뮬레이션까지 연구를 진행할 계획이다.
References
[1] I. Kim, S. Park, W. Park, C. Yoo, “Deploy Position Determination for Accurate Parachute Landing of a UAV”, Journal of The Korean Society for Aeronautical and Space Sciences, Vol. 41, No.6, pp. 465-472, June, 2013.
DOI: http://dx.doi.org/10.5139/JKSAS.2013.41.6.465
[2] O. Prakash and N. Ananthkrishnan, “Modeling and Simulation of 9-DOF Parafoil-Payload System Flight Dynamics”, AIAA-2006-6130.
[3] C. Toglia and M. Vendittelli, “Modeling and Motion Analysis of Autonomous Paragliders”, Technical Report of University of Rome, May 2010.
[4] Y. Gang, “Nine-degree of Freedom Modeling and Flight Dynamic Analysis of Parafoil Aerial Delivery System”, Procedia Engineering, Vol.99, pp.866-872, 2015.
DOI: http://dx.doi.org/10.1016/j.proeng.2014.12.614
[5] Headquarters, Department of the U.S Army, “Unit and Direct Support Maintenance Manual (Including Repair Parts and Special Tools List) for MC-4 Ram Air Free-Fall Personnel Parachute System”, Technical Manual, July, 2003.
[6] P. B. S. Lissaman, G. J. Brown, “Apparent Mass Effects on Parafoil Dynamics”, AIAA-93-1236, 1993.
DOI: http://dx.doi.org/10.2514/6.1993-1236
[7] Headquarters, Department of the U.S Army, “Special Forces Military Free-Fall Operations”, FM 3-05.211 (FM 31-19) MCWP 3-15.6 NAVSEA SS400-AG- MMO-010 AFMAN 11-411(I), April, 2005.
|
이 상 종(Sang-Jong Lee) [종신회원] |
|
|
|
•1994년 2월 : 인하대학교 공과대학 항공우주공학과 (공학석사) • 2008년 2월 : 한국과학기술원 항공우주공학과 (공학박사) • 1996년 3월 ~ 2014년 2월 : 한국항공우주연구원 선임연구원 • 2014년 3월 ~ 현재 : 인하공업전문대학 항공기계과 조교수 |
|
<관심분야> 항공전자, 비행동역학, 항법/유도/제어, 비행시험 |
|
|
민 병 문(Min, Byoung-Mun) [종신회원] |
|
|
|
• 2003년 2월 : 전북대학교 공과대학 항공우주공학과 (공학석사) • 2014년 2월 : 한국과학기술원 항공우주공학과 (공학박사) • 2009년 3월 ~ 2015년 2월 : 대한항공 항공기술연구원 연구3급 • 2015년 3월 ~ 현재 : 인하공업전문대학 항공기계과 조교수 |
|
<관심분야> 비행동역학, 무인기 유도 및 제어, 비행시험 |
|

