|
전장환경 하에서 보행자의 다양한 이동유형을 고려한 |
|
박상훈1*, 채종목2, 이장명3 1한화시스템 지휘통제팀, 2국방기술품질원, 3부산대학교 전자전기공학부
|
|
Pedestrian Dead Reckoning based Position Estimation Scheme considering Pedestrian's Various Movement Type |
|
SangHoon Park1*, Jongmok Chae2, Jang-Myung Lee3 1Command & Control Team, Hanwha Systems Co., Ltd. 2Defense Agency for Technology and Quality 3Electrical Engineering, Pusan National University |
|
요 약 일반적으로 보행자의 위치를 파악하는데 사용하는 시스템을 개인 항법 장치 (PNS: Personal Navigation System)라고 한다. 위성 항법 시스템(GPS: Global Positioning System)은 PNS의 대표적인 사례이나, GPS 위성 신호 수신이 어려운 지역에서는 적용이 어려운 단점이 있다. GPS 신호 음영지역에서의 위치정보를 획득하기 위한 방법으로서 보행자 관성 항법(PDR: Pedestrian Dead Reckoning)은 별도의 인프라 없이 관성측정장치(IMU: Inertial Measurement Unit)만을 이용하여 보행자의 위치를 추정하는 방식으로서 인프라 구축이 어려운 특수 분야에 적용이 적합한 방식이다. 본 논문에서는 전장환경과 같은 GPS가 제한되는 특수한 환경 하에서 보행자의 다양한 이동유형을 고려한 관성항법 기반의 보행자용 위치인식 기법을 제안한다. 걷기, 뛰기, 포복과 같은 다양한 이동 형태에 따른 보행 거리 추정을 위해 IMU에서 제공되는 센서의 정보를 활용하여 걸음 검출과 보폭 추정으로 구성되는 보행거리 추정 기법과 HDR 알고리즘과 EKF(Extended Kalman Filter) 기반의 보행방향 추정 기법을 제안한다. 또한 건물입구와 같은 GPS 신호가 수신이 되나 신뢰성이 떨어지는 구간에서의 GPS와 PDR간 위치정보 융합 기법을 제안한다. 제안 기법의 성능 검증을 위해 자체 위치인식 모듈을 제작하여 국외제품과 비교 실험을 실시하였다. 실험결과, 제안 기법은 약 600m의 이동경로에서 평균 위치오차 거리는 5.64m, 이동거리 오차율 3.41%의 결과를 보였다.
|
|
Abstract In general, Personal Navigation Systems (PNSs) can be defined systems to acquire pedestrian positional information. GPS is an example of PNS. However, GPS can only be used where the GPS signal can be received. Pedestrian Dead Reckoning (PDR) can estimate the positional information of pedestrians using Inertial Measurement Unit (IMU). Therefore, PDR can be used for GPS-disabled areas. This paper proposes a PDR scheme considering various movement types over GPS-disabled areas as combat environments. We propose a movement distance estimation scheme and movement direction estimation scheme as pedestrian's various movement types such as walking, running and crawling using IMU. Also, we propose a fusion algorithm between GPS and PDR to mitigate the lack of accuracy of positional information at the entrance to the building. The proposed algorithm has been tested in a real test bed. In the experimental results, the proposed algorithms exhibited an average position error distance of 5.64m and position error rate in goal point of 3.41% as a pedestrian traveled 0.6km.
Keywords : Inertial Measurement Unit, Pedestrian Dead-Reckoning, Position Estimation |
![]()
1. 서론
일반적으로 보행자의 위치를 파악하는데 사용하는 시스템을 개인 항법 장치 (PNS: Personal Navigation System)라고 한다. 위성 항법 시스템(GPS: Global Positioning System)은 PNS의 대표적인 사례이다. GPS는 위성 신호의 수신이 용이한 지역에서는 적용이 가능하나 그림 1과 같이 터널 내부와 같은 GPS 위성 신호 수신이 어려운 지역에서는 적용이 어려운 단점이 있다.
이에 따라 GPS 신호 음영지역에서의 위치정보를 획득하기 위한 연구가 많이 진행되어 왔다. 이중 보행자 관성 항법(PDR: Pedestrian Dead Reckoning)은 별도의 인프라 없이 관성측정장치(IMU: Inertial Measurement Unit)만을 이용하여 보행자의 위치를 추정하는 방식으로서 인프라 구축이 어려운 특수 분야에 적용이 적합한 방식이다. 본 논문에서는 군사분야와 같은 특수분야 환경에서의 적용을 고려한 PDR 기반의 보행자 위치 추정기법을 제안한다.
Fig. 1. An example of GPS-disabled area.
PDR은 보행자의 위치가 일반적으로 걸음에 의해 변화한다는 특성을 활용한다. PDR은 보행 거리 추정과 보행 방향 추정으로 구성된다. 보행자의 이동 형태는 다양한 형태(예: 걷기, 뛰기, 포복 등)가 있을 수 있기 때문에 각 이동 형태에 따라 적절한 보행 거리 추정 방식을 적용하여야 한다. 본 논문에서는 각 이동 형태에 따른 보행 거리 추정을 위해 IMU에서 제공되는 센서의 정보를 활용하여 걸음 검출, 보폭 추정, 보행 패턴 판독 알고리즘을 적용하여 보행 거리를 추정하는 기법을 제안한다. 보행 방향 추정 측면에서는 자세 추정과 방향각 추정 기법을 제안한다. 또한 GPS와 PDR간 위치정보 융합 기법을 제안한다.
본 논문의 구성은 다음과 같다. 2장에서는 보행자용 관성항법 분야에서의 관련연구를 소개하고 3장에서는 제안하는 PDR 시스템 구성과 위치추정 기법을 소개한다. 4장에서는 실험을 통한 제안 위치추정 기법의 성능을 검증하고 5장에서 결론을 맺는다.
2. 관련 연구
일반적으로 PDR은 IMU에서 제공되는 정보를 이용하기 때문에 IMU의 성능에 의존적인 특성을 갖는다. 따라서 IMU의 성능에 따른 위치 오차의 변동폭이 큰 것으로 보고되고 있다. 아래 표는 다양한 IMU를 이용한 PDR 연구 사례들을 보여준다. 이동거리에 따른 위치 오차 측면에서 고가형 IMU를 적용한 경우, 약 3 % 이내의 성능을 보여주고 있다. 이에 반해 저가형 IMU를 적용한 경우에는 약 10 % 이내의 성능을 보여주고 있다. 그러나 본 표에서 소개된 기존의 연구들은 보행자가 일반적인 걸음유형으로 이동시를 고려한 위치추정 기법으로서, 전장 환경에서 전투원이 다양한 유형으로 이동시 적용하기에는 제한사항이 있다.
Table 1. Related work in PDR
|
Research title |
Sensor-type |
Distance |
Environment |
Position error rate |
|
New Map-Matching Algorithm using Virtual track for Pedestrian Dead Reckoning[3] |
Low-end |
785m |
Outdoor |
7.3% |
|
Moving Distance Measurement System using a Accelerometer Sensor[4] |
Low-end |
1,275m |
Indoor |
6.3% |
|
Robust Indoor Localization on a Commercial Smart-Phone[5] |
Low-end |
220m |
Outdoor |
0.7% |
|
Non-GPS Navigation with the Pedestrian Dead-Reckoning System[6] |
High-end |
522m |
Indoor |
0.2% |
|
Personal Dead-reckoning System for Firefighters[2] |
High-end |
1,685m |
Indoor |
1.5% |
|
Indoor Pedestrian Navigation using an INS/EKF framework for Yaw Drift Reduction and a Foot-mounted[7] |
High-end |
125m |
Indoor |
1.5% |
|
Dead Reckoning Navigation with Constant Velocity Update[8] |
High-end |
315m |
Indoor |
0.4% |
|
A Robust Humanoid Robot Navigation Algorithm with ZUPT[9] |
High-end |
324m |
Indoor |
0.3% |

Fig. 2. DRM of Honeywell.
그림 2는 Honeywell사의 DRM 장비를 보여준다. DRM의 위치 추정 원리는 걸음 검출 및 보폭 추정 그리고 자세 및 방향 추정을 통해 보행자의 위치를 추정한다. 내부적으로 위치정보의 융합을 위해 칼만 필터를 사용하고 있으며 보행자의 보폭과 자세를 추정한다. 기본적으로 DRM에서 추측된 보행자 위치정보의 정확도는 주행 거리 및 운용 지역의 지구자기장 특성에 영향을 받는다. 또한, 다양한 걸음유형에 적응적인 위치추정을 위해 SmartPedometry™ 기능을 제공한다[1].
그림 3은 미시건 대학교의 소방관용의 추측 항법 시스템을 보여준다. 본 시스템은 IMU 센서를 활용한 추측 항법 시스템으로써, IMU의 가속도 및 자이로에서 드리프트(drift)를 제거하는 기법을 사용한다. 소형의 IMU를 부츠의 하단에 장착하고 무선 단말기와의 통신을 통해 운용된다. 또한 위치 추정의 정확도를 높이기 위해 ‘Dominant Directions in HDE Algorithm( DDs)’을 적용한다[2].

Fig. 3. PDR system for firefighter.
3. 다양한 이동유형을 고려한 PDR 기법
3.1 PDR 기법 소개
3.1.1 보행거리 추정 기법
PDR은 보행자의 걸음 정보를 기반으로 위치를 추정한다. 이 때 걸음의 정보는 곧 보행자가 이동한 것을 의미하며, 이 정보는 보폭 추정에 활용되기 때문에 매우 중요하다. PDR에서는 보행자의 걸음을 추측하기 위해 IMU를 활용하며, 초기 위치에서 보행자가 이동한 거리를 보행자의 걸음 정보를 바탕으로 추정한다.
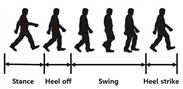
Fig. 4. Moving pattern of pedestrian.
걸음 정보는 그림 4와 같이 정지 상태(Stance), 뒤꿈치 들기(Heel off), 발의 회전(Swing), 뒤꿈치 찍기(Heel strike) 등 총 4단계로 구성되며, 이러한 보행 동작을 IMU를 활용하여 분석한다.
일반적으로 PDR에서 주로 사용되는 걸음 검출 기법은 피크치 검출 (peak detection), 일정 구간 검출(flat zone detection), 영 교차점 검출(zero crossing detection method) 기법 등이 있다.
피크치 검출 기법은 보행자의 이동할 때 발이 지면에 닿는 순간 충격이 일어나는데 이 때 가속도 신호의 정점에 달하는 순간들을 검출하는 방법으로 보행 속도에 따라 피크치 크기가 달라져 임계치를 정하기 어렵다는 단점이 있다. 일정 구간 검출 기법은 IMU 센서가 발에 장착 되어야 적용이 가능한 방법으로서 지면에 발이 붙어있는 동안 가속도 센서의 신호가 일정한 특성을 보이는 구간을 검출하는 기법이다. 영 교차점 검출 기법은 걸음을 이동할 때 가속도 센서의 출력 부호가 바뀌는 특성을 이용하여 부호가 바뀌는 지점에서 걸음을 검출하는 기법이며 단 신호의 떨림 현상에 대한 처리가 필요하다[10].
보폭 추정을 위해서는 일반적으로 아래 식과 같이 구현 복잡도가 낮고 단일 보폭 추정 파라미터를 사용하는 비선형 모델이 많이 적용된다[11].
![]() (1)
(1)
Amax와 Amin은 개별 걸음 내에서 발생하는 가속도의 최대값 및 최소값을 의미한다. K는 보폭 결정 상수를 의미하며 일반적인 성인의 보폭(예: 0.65m)을 기준으로 하여 사전 실험을 통해 특정 상수값을 적용할 수 있다.
3.1.2 보행방향 추정 기법
보행 방향 추정은 크게 자세 추정과 방향 추정으로 구성된다. 일반적으로 보행방향 추정을 위해서는 각속도 값을 측정할 수 있는 자이로 센서를 활용한다.
하지만 자이로 센서를 적용할 경우, 적분오차로 인한 누적오차가 발생하는 문제가 있다. 그림 5는 적분오차로 인한 누적오차를 줄이기 위한 HDR 알고리즘의 구성도를 보여준다. wture는 자이로 센서에서 에러가 포함되지 않은 이상적인 값을 말한다. 여기서 ε0는 자이로 센서가 움직이지 않을 때 일정 시간 동안 수집된 측정 값을 평균하여 계산한 초기 바이어스 값이다. εd는 시간에 따라 조금씩 변화하는 바이어스 값으로서 적분오차를 의미한다. wi는 최종 출력되는 자이로 값이다[12].
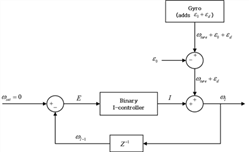
Fig. 5. Structure of HDR algorithm.
또한 자이로 센서를 이용하여 보행방향을 추정하는 경우 순간 회전 각속도에 의존하기 때문에 보행자의 보행방향이 급격하게 회전하는 시점에서는 추정한 방향의 정확도가 크게 떨어지는 문제점이 있다.
3.2 제안 PDR 시스템
3.2.1 시스템 구성도
그림 6은 본 연구에서 제안하는 PDR 시스템 구성도를 보여준다. 보행자가 이동을 하게 되면 관성 센서에서는 관련 정보를 측정하여 보행 거리 추정과 보행 방향 추정을 위한 입력 값으로 전달한다. 보행 거리 추정은 가속도 센서(Accelerometer) 정보를 이용하여 보행 패턴 판독, 걸음 검출(step detection), 보폭 추정(step length estimation)의 과정을 거쳐 보행 거리(δd)를 추정한다.
보행 방향 추정에서는 자이로(Gyro) 센서와 지자기(compass) 센서를 활용하여 자세 추정(attitude estimation), 방향 추정(heading estimation), 높이 추정의 과정을 거쳐 보행 방향(δω)을 추정한다.
융합 필터에서는 EKF(Extended Kalman Filter)를 활용하여 보행 거리와 보행 방향을 융합하고 주기적으로 GPS 수신 값(P,Sn)의 적용여부를 판단하여 최종적인 위치 정보 값(δP)을 추정한다.
GPS 융합에서는 보행자의 위치정보 정확도를 향상시키기 위해서는 PDR과 GPS의 장점을 적절히 융합한다. 제안 시스템에서는 PDR을 통해 보행자의 위치정보를 추정하면서 주기적으로 GPS 위치정보를 갱신한다.
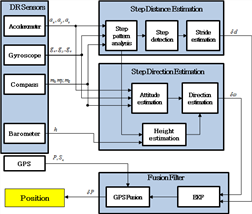
Fig. 6. Block diagram of PDR-based position estimation system.
3.2.2 보행거리 추정
걸음 검출을 위해 피크치 검출 기법과 영 교차점 검출 기법을 결합한 방식을 제안한다. 먼저 3축 가속도 센서에서 측정된 각 축에 대한 정보를 norm 값으로 변화 후 영 교차점 검출 기법에 대한 단점을 완화하기 위해 이동평균필터(Moving Average Filter)를 적용한다. 이후 단일걸음에서 측정된 가속도 센서의 최대값을 검출하여 확인하고 한걸음에 측정된 가속도 센서의 최소값을 검출하여 확인한다. 마지막으로 피크치 검출기법이 적용된 후 가속도 센서의 값이 영교차하는 지점을 검출하고 피크치 검출기법에서 측정된 각 피크치 변수를 초기화시킴으로써 걸음검출을 완료한다[14].
보폭 추정을 위해서는 비선형 모델을 적용한다. 일반적으로 비선형 모델 적용 시에는 보폭 추정 파라미터(K) 값은 일반적으로 상수값이 적용된다. 하지만 보행자마다 보폭의 크기가 상이하고 동일 보행자라도 보행 유형에 따라 보폭이 변화할 수 있다. 본 논문에서는 이러한 특성을 고려하여 보폭에 따라 퍼지 추론 시스템(FIS: Fuzzy Inference System)을 활용한 적응적인 K값을 적용한다[14].
3.2.3 보행방향 추정
본 논문에서는 보행방향 추정을 위해 기본적으로 자이로센서를 적용한다. 자이로 센서의 적분 오차를 제거하기 위해서는 상기한 HDR(Heuristic Drift reduction) 알고리즘을 적용한다.
그림 7은 약 75m를 이동하였을 경우 HDR 알고리즘을 적용한 결과를 보여준다. HDR 알고리즘을 적용하지 않은 경우(No HDR) 처음 직선을 이동할 경우 미세하게 발생하는 드리프트 오차로 인해 방향이 틀어지는 것을 볼 수 있다. HDR을 적용할 경우 이를 최소화하기 때문에 No HDR에 비해 방향 추정 정확도가 향상되는 결과를 보였다.
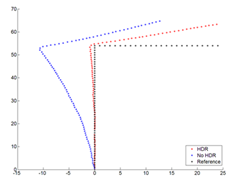
Fig. 7. An experimental result of HDR algorithm.
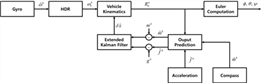
Fig. 8. Sensor fusion system using EKF.
또한 자이로 센서 적용 시, 보행자의 보행방향이 급격히 변하는 지점에서의 보행방향 정확도 저하 문제를 완화하기 위하여 가속도센서와 지자기센서를 융합하여 적용한다. 지자기 센서의 Roll, Pitch, Yaw와 융합을 하기 위해서 확장 칼만 필터 (EKF: Extended Kalman Filter)를 적용한다[13]. 그림 8은 EKF를 이용한 센서 융합 시스템 구성도이다.
3.2.4 PDR과 GPS간 위치정보 융합
GPS는 보행자에게 절대 위치 값을 제공해주지만, 건물 입구와 같은 곳에서는 GPS 신호의 수신이 양호하지 못하여 GPS에 의해 제공되는 위치값의 오차가 커지게 된다. 따라서 이러한 구간에서는 GPS와 PDR을 적절히 융합하여 위치정보를 추정하는 것이 필요하다. 본 논문에서는 그림 9와 같은 GPS와 PDR간 융합 알고리즘을 제안한다.
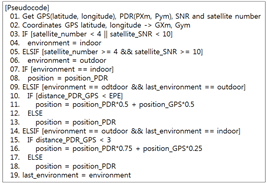
Fig. 9. Pseudo code of fusion algorithm of GPS and PDR.
제안 알고리즘은 1차적으로 GPS 신호의 신뢰성을 GPS 위성의 수와 GPS 신호의 SNR 값에 기반하여 판단한다. 2차적으로는 EPE(Estimated Positional Error)에 기반하여 GPS 신호의 신뢰성을 판단한다. EPE는 다음과 같이 구할 수 있다.
![]() (2)
(2)
여기서 A는 현재의 위치에서 최대 GPS 수신의 오차 범위, Nsatellite는 위성의 수, C는 최대 GPS 수신의 오차 범위를 적용할 최소 위성 개수의 범위를 의미한다. 예를 들어, Nsatellite는 4, A는 20, C는 3일 경우 GPS 위성의 4개에 대한 허용되는 오차 범위는 20 m가 되는 것이다. 최종적으로 시스템은 GPS 신호의 신뢰성 값에 따라 GPS 위치정보를 적용할지, PDR 위치정보를 적용할지 결정한다.
4. 실험 결과
4.1 위치인식모듈 구현
그림 10은 본 논문에서 제안한 알고리즘의 성능검증을 위해 자체 제작한 위치인식모듈의 전면부/후면부 형상을 보여준다. 위치인식모듈은 MCU, IMU, Barometer, GPS, Battery, Bluetooth로 구성된다.
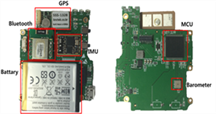
Fig. 10. Implemented PDR module.
4.2 위치인식모듈 부착위치에 따른 위치오차 영향도
위치인식모듈의 위치오차를 최소화하기 위해서는 보행자의 이동에 따라 위치인식모듈의 움직임을 최소화하는 것이 중요하다. 본 실험에서는 최적 부착위치를 찾기 위하여 실험적으로 그림 11과 같이 <후방 허리 중앙>, <후방 등 중앙>, <우측 가슴>에 부착하여 위치정확도 측면에서 비교 실험을 실시하였다.

Fig. 11. Mounting positions of PDR module.
그림 12는 위치인식모듈의 부착위치에 따른 위치정확도를 비교한 실험결과를 보여준다. 실험 시 보행자의 이동 경로는 ‘역 기역자’ 형태이며 총 이동거리는 315.2m이다. 실험결과에서 ‘Reference’는 보행자의 실제 이동경로를 의미하며, ‘DRM’은 Honeywell사의 DRM 모듈을 보행자가 부착하여 이동시 위치추정 결과를 의미하며, ‘SPEM’은 본 논문에서 자체 제작한 위치인식모듈을 보행자가 부착하여 추정된 위치값을 의미한다.
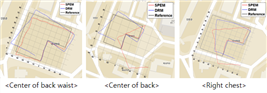
Fig. 12. Experimental results with regard to PDR module’s mounting position
그림에서 보여진 위치추정 실험결과를 보면 SPEM과 DRM이 실제 이동경로 대비 위치오차가 발생하나, 위치인식모듈을 후방 허리 중앙에 부착 시의 위치값이 실제 이동경로(Reference)와 가장 근접하게 추정됨을 본 실험을 통해 확인할 수 있었다.
4.3 보행 유형에 따른 위치인식 오차 영향도
관성항법 기반의 PDR 알고리즘은 태생적으로 보행자의 보행 유형이 위치인식 정확도에 영향을 줄 수 있다. 특히 일반적인 보행이 아닌 특수한 보행(예: 군사작전에서의 포복 등) 유형이 포함될 경우 위치인식 정확도가 떨어질 수 있다.
|
Section |
Distance(m) |
Section |
Distance(m) |
|
a |
41.1 |
m |
29.4 |
|
b |
3.2 |
n |
29.4 |
|
c |
38.6 |
o |
29.6 |
|
d |
17.3 |
p |
46 |
|
e |
40.1 |
q |
49.8 |
|
f |
14.8 |
r |
15.8 |
|
g |
14.7 |
s |
16.75 |
|
h |
9.9 |
t |
9.1 |
|
i |
30.1 |
u |
17.4 |
|
j |
9.9 |
v |
25.1 |
|
k |
16.1 |
w |
3 |
|
l |
87.9 |
- |
- |
|
Total distance(m) |
595.12 |
||
본 실험에서는 보행자의 다양한 보행 유형에 따른 위치인식모듈의 위치인식 추정 결과를 확인하였다. 이를 위해 본 실험에서는 군사작전 상황을 고려하여 전술 보행(일반 보행), 약진(몸을 숙이고 달리기), 포복(몸을 앞으로 엎드려 이동), 천천히 걷기, 경계태세(정지 후 1분간 사주경계) 등 총 5가지의 보행 유형을 적용하였다.
표 2 및 그림 13은 이동경로 #1에 대한 보행자의 실제 이동경로(Reference)와 이동유형을 보여준다. 본 실험에서 보행자의 총 이동거리는 595m이다.
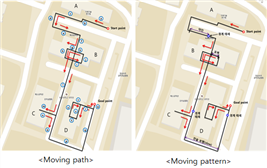
Fig. 13. Moving pattern in path #1
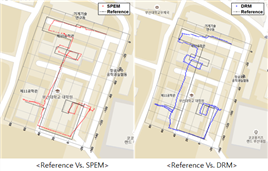
Fig. 14. Experimental results with regard to various moving pattern in path #1
그림 14는 이동경로 #1에서의 SPEM 및 DRM을 적용한 위치인식 실험결과를 보여준다. 좌측 그림은 ‘Reference’와 SPEM과의 이동경로 비교결과를 보여주며, 우측 그림은 ‘Reference’와 DRM과의 이동경로 비교결과를 보여준다. 또한 그림 15는 이동거리에 따른 이동거리 오차거리와 오차율의 변화를 보여준다. SPEM의 평균 위치거리는 5.64m, 목적지(Goal point)에서의 이동거리 오차율은 3.41%로 측정되었으며, DRM의 평균 위치 오차거리는 8.6m, 목적지(Goal point)에서의 이동거리 오차율은 4.23%로 측정되었다.
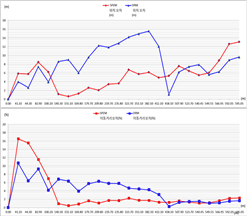
Fig. 15. Experimental results in path #1
(average position error rate & position error distance)
표 3 및 그림 16은 이동경로 #2에 대한 보행자의 실제 이동경로(Reference)와 이동유형을 보여준다. 본 실험에서 보행자의 총 이동거리는 788m이다. 그림 17은 이동경로 #2에서의 SPEM 및 DRM을 적용한 위치인식 실험결과를 보여준다. 좌측 그림은 ‘Reference’와 SPEM과의 이동경로 비교결과를 보여주며, 우측 그림은 ‘Reference’와 DRM과의 이동경로 비교결과를 보여준다.

Fig. 16. Moving pattern in path #2
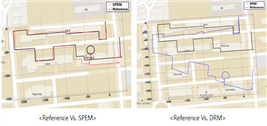
Fig. 17. Experimental results in path #2
|
Section |
Distance(m) |
Section |
Distance(m) |
|
a |
38.71 |
m |
27.3 |
|
b |
16.81 |
n |
51.6 |
|
c |
17.80 |
o |
25 |
|
d |
76.30 |
p |
18.6 |
|
e |
4.15 |
q |
8 |
|
f |
90.60 |
r |
15.8 |
|
g |
11.05 |
s |
12 |
|
h |
32.00 |
t |
55.92 |
|
i |
40.45 |
u |
12 |
|
j |
47.50 |
v |
68.5 |
|
k |
27.30 |
w |
49 |
|
l |
43.90 |
- |
- |
|
Total distance(m) |
788.12 |
||
5. 결론
본 논문에서는 전장환경과 같은 특수한 환경 하에서 보행자의 다양한 이동유형(걷기, 뛰기, 포복)을 고려한 PDR 기반의 위치인식 기법을 제안하였다. 제안기법은 GPS 위치정보의 활용이 어려운 GPS 음영지역에서 관성센서를 활용하여 보행자가 이동시 보행거리와 보행방향을 추정하여 보행자의 위치정보를 추정하였다. 또한 건물입구와 같이 GPS 정보가 일부 수신되는 상황을 고려하여 PDR과 GPS간 위치정보 융합 기법을 제안함으로서 보행자에 대한 위치정보를 끊김없이 획득하는 것이 가능한 방법을 제안하였다.
제안기법의 검증을 위해 자체 제작한 위치인식모듈을 보행자가 부착하여 유사 운용환경 하에서 이동하여 위치정보를 측정한 결과 약 600m의 이동거리 상에서 평균 위치오차 거리는 5.64m, 이동거리 오차율 3.41%의 결과를 각각 보였다. 또한 동일 환경에서 국외제품과의 비교실험을 실시한 결과, 상대적으로 우수한 위치인식 정확도 결과를 보였다. 이는 위치인식 오차의 성능 측면에서 본 논문에서 가정하는 전장 환경에서의 운용개념(건물내 소부대 작전 시 전투원간의 위치정보 공유)에 적용이 가능할 것으로 예상된다. 또한 군 운용성(위치인식모듈의 중량 및 부착위치 등) 측면에서도 큰 제한사항은 없을 것으로 예상된다.
향후 개선방향으로는 보행자가 건물 내 층간 이동시 높이정보와의 융합기법에 대한 연구가 필요하다.
References
[1] Honeywell, “DRMTM 4000L Dead Reckoning Module,”
http://aerospace.honeywell.com/products/sensors/ magnetic-sensing-solutions/dead-reckoning.
[2] University of Michigan Mobile Robotics Lab, "Personal Dead-reckoning (PDR) System for Firefighters,"
https://www.wpi.edu/Images/CMS/ECE/Johann_Borenstein(3).pdf.
[3] S. H. Shin, C. G. Park, and S. Choi, “New Map-Matching Algorithm using Virtual track for Pedestrian Dead Reckoning,” Journal of Electronics and Telecommunications Research Institute, vol. 32, no. 6, pp. 891-900, Dec. 2010.
DOI: http://dx.doi.org/10.4218/etrij.10.0110.0037
[4] S. H. Park, J. H. Lee, S. W. Lim, J. H. Lim, and J. Y. Ryu, “Moving Distance Measurement System using a Accelerometer Sensor”, Journal of the Korea Institute of Information and Communication Engineering, vol. 16, no. 6, pp. 1300-1305, Jun.2012.
DOI: http://dx.doi.org/10.6109/jkiice.2012.16.6.1300
[5] N. Kothari, B. Kannan, E. D. Glasgwow, and M. B. Dias, “Robust Indoor Localization on a Commercial Smart-Phone,” ANT 2012 and MobiWIS 2012, vol. 10, pp. 1114-1120, 2011.
[6] L. Ojeda and J. Borenstein, “Non-GPS Navigation with the Pedestrian Dead-Reckoning System,” SPIE Defense and Security Conference, Apr.2007.
[7] A. R. Jimenez, F. Seco, J. C. Prieto and J. Guevara, “Indoor Pedestrian Navigation using an INS/EKF framework for Yaw Drift Reduction and a Foot-mounted,” Positioning Navigation and Communication(WPNC), 2010 7th Workshop on, pp. 135-143, Mar. 2010.
DOI: http://dx.doi.org/10.1109/wpnc.2010.5649300
[8] Y. Li, J. Wang, S. Wiao, and X. Luo, “Dead Reckoning Navigation with Constant Velocity Update,” Control Automation Robotics & Vision (ICARCV), 2012 12th International Conference on, pp. 160~165, Dec. 2012.
DOI: http://dx.doi.org/10.1109/icarcv.2012.6485151
[9] Y. Li, X. Luo, X. T. Ren and J. J. Wang, “A Robust Humanoid Robot Navigation Algorithm Algorithm with ZUPT,” Mechatronics and Automation (ICMA), 2012 International Conference on, pp. 505-510, Aug. 2012.
DOI: http://dx.doi.org/10.1109/icma.2012.6283159
[10] J. Kim and S. Lee, “Estimation of the User’s Location/Posture for Mobile Augmented Reality,” Journal of Institute of Control Robotics and Systems, pp. 1011-1017, Nov 2012.
DOI: http://dx.doi.org/10.5302/J.ICROS.2012.18.11.1011
[11] W. Chen, “An Effective Pedestrian Dead Reckoning Algorithm Using a Unified Heading Error Model,” Position Location and Navigation Symposium, pp. 340-347, May 2010.
DOI: http://dx.doi.org/10.1109/PLANS.2010.5507300
[12] J. Borenstein, L. Ojeda, and S. Kwanmuang, “Heuristic Reduction of Gyro Drift For Personnel Tracking Systems,” Journal of Navigation, vol. 62, no. 1, pp. 41-58, Jan. 2009.
DOI: http://dx.doi.org/10.1017/S0373463308005043
[13] E. Foxlin, “Inertial head-tracker sensor fusion by a complementary separate-bias Kalman filter,” Proceedings of the IEEE, Mar. 1996.
DOI: http://dx.doi.org/10.1109/vrais.1996.490527
[14] Y. K. Kim, H. M. Ha, S. H. Park, H. K. Kwak, C. W. Lee, and J. M. Lee, “Adaptive step length estimation method in pedestrian moving speed using FIS from PDR system,” Submitted to Journal of Institute of Control, Robotics and Systems, Sep. 2015.
|
박 상 훈(SangHoon Park) [정회원] |
|
|
|
•2001년 2월 : 강원대학교 정보통신공학과 학사 •2003년 2월 : 강원대학교 컴퓨터정보통신공학과 석사 •2008년 2월 : 광주과학기술원 정보통신공학과 박사 •2008년 4월 ~ 현재 : 한화탈레스 수석연구원 |
|
<관심분야> 멀티미디어 스트리밍, 웨어러블 컴퓨팅 |
|
|
채 종 목(Jongmok Chae) [정회원] |
|
|
|
•2014년 9월 : 국방대학교 국방전략학(석사) •1986년 8월 ~ 2006년 6월 : 국방품질관리소 선임연구원 •2006년 7월 ~ 현재 : 국방기술품질원 책임연구원 |
|
<관심분야> 국방정보통신, 국방품질 |
|
|
이 장 명(Jang-Myung Lee) [정회원] |
|
|
|
•1980년 2월 : 서울대학교 전자공학과 (공학사) •1982년 2월 : 서울대학교 전자공학과(공학석사) •1990년 2월 : South California, 전기 및 컴퓨터 공학부(공학박사) •1992년 3월 ~ 현재 : 부산대학교 전자전기공학부 정교수 |
|
<관심분야> 지능로봇 시스템 설계 및 제어, 마이크로 프로세서 응용,센서융합, Navigation/Localization |
|


