|
착저형 수중장비를 이용한 수중작업 시 작업경계면 인식을 위한 소나시스템 활용법 |
|
신창주1, 장인성1*, 원덕희1, 서정민1, 백원대1, 김기훈2, 김종훈3 1한국해양과학기술원 연안방재연구센터, 2선박해양플랜트연구소 수중로봇연구실, 3(주)희송지오텍
|
|
Sonar System Application for detection of underwater work space boundary using seabed type underwater equipments |
|
Changjoo Shin1, In-Sung Jang1*, Deokhee Won1, Seo Jung-min1, Won-Dae Baek1, Kihun Kim2, KIM JONG HOON3 1Coastal Disaster Prevention Research Center, Korea Institute of Ocean Science and Technology 2Marine Robotics lab, Korea Research Institute of Ship & Ocean Engineering 3Heesong Geoteck Co., Ltd.
|
|
요 약 수중사석고르기 장비와 같은 착저형 수중장비를 활용하여 해저면에서 수중 작업을 수행할 경우 해당 장비는 작업경계면을 정확히 인식하고 작업장 내에 자리잡고 있는 것이 중요하다. 이는 장비 전복과 같이 장비 안전사고와 직결될 수 있기 때문이다. 이 때 작업경계면 표식을 위해서는 잠수부의 도움이 필수적인데, 이를 위하여 잠수부가 수중작업을 수행할 때 작업이 용이하면서도 시중에서 쉽게 구할 수 있으며 재료를 선정하는 것이 중요한데 나일론줄을 해저면에 설치하여 작업경계를 표시하도록 하였다. 수중에서 주변 환경을 관찰하기 위하여 소나와 팬틸트를 이용하여 소나시스템을 구성하였으며 이를 이용하여 거리변화에 따른 수중 작업경계면 탐지 여부를 확인하였다. 또한 수중사석고르기 장비에 최종적으로 소나시스템을 설치하고 나일론줄로 표시된 작업경계면에 대한 탐지여부를 검증하였다. 본 연구결과를 활용하여 착저형 수중장비를 이용한 수중작업 시 작업경계면 인식을 수행할 수 있는 방안을 확보하였다. 작업경계면 인식 방안을 활용할 경우 추후에 개발될 수 있는 다양한 종류의 착저형 수중작업 장비의 작업절차에 광범위하게 적용할 수 있을 것으로 판단된다.
|
|
Abstract The detection of an underwater work space boundary is very important when an underwater construction is carried out using seabed type underwater equipment, such as underwater machines for rubble mound leveling, because it can induce industrial disasters. Therefore, divers are needed to mark the underwater work space boundary. A nylon rope is used to improve the convenience during an underwater diver's work. The results showed that the work space boundary can be detected using a sonar system. Using these results, an efficient method to detect the underwater work space boundary can be obtained when an underwater construction is carried out using seabed type underwater equipment.
Keywords : Sonar, Detection, Underwater work space boundary, Underwater equipment |
![]() 1. 서론
1. 서론
한국해양과학기술원은 Fig. 1과 같이 항만 공사 공정 중 하나인 수중사석고르기 작업을 수행할 수 있는 수중사석고르기장비를 개발하고 있다. 수중사석고르기 작업은 다이버가 수중에서 수행하는 업무 중 깊은 수심, 강한

Fig. 1. Underwater equipment for rubble mound leveling
조류, 작업 시 발생하는 부유물들로 인한 난시야 등으로 매우 험한 작업 중 하나이다[1]. 이를 극복하고 안전한 작업을 수행하기 위하여 무인 수중사석고르기장비를 투입하고자 한다.
장비가 수중작업공간에 투입되어 수행할 전체 작업 중 가장 위험한 경우는 장비가 작업경계면을 인식하지 못하고 가장자리에서 전도되는 상황이다. 따라서 수중에서 장비가 작동함에 있어 작업경계면을 항상 인식할 수 있어야만 한다. 수중작업 시 경계면 인식을 위한 수중환경모니터링을 수행할 때 광학카메라 대신 소나를 이용하는 것이 유리하다[2].
개발장비를 이용하여 수중작업을 수행하는데 잠수사의 도움이 일부 필요하다. 수중에서 작업을 수행하기 위하여 산업잠수부가 요구되는데 세계적으로 통용되는 산업잠수 인증기관으로 ADCI[3], IMCA[4]등이 있으며 해당 기관들은 산업 잠수사에 대한 인증, 잠수작업 기준을 제시하고 있다. 국내의 경우 산업잠수는 최대 57.9m로 제한하며, 이때 잠수시간은 매우 제한적이다[5]. 즉, 개발장비의 작업을 보조하기 위하여 투입되는 전문 산업잠수사일지라도 이들의 안전을 확보하기 위해서는 수중업무를 최소화하는 것이 필요하다.
Frias[6]는 1.8MHz 주파수의 음파를 사용하는 소나를 탁도 5이하 수중 조건에서 3m 전방의 물고기를 명확히 인식한 바 있다. 해당 주파수를 사용하는 소나의 경우 매우 깨끗한 영상을 보여주기 때문에 대상물 인식하기에는 유리하나, 고주파 음파를 사용하는 관계로 인하여 탁도가 높거나, 또는 원거리 탐지에는 적합하지 않은 장비이다. Lee[7]는 소나를 이용하여 수중의 인공표식물을 탐지하는 방법하고 인식할 수 있는 알고리즘을 연구한바 있다. 소나를 이용하여 수중 표식물을 인식하는 것은 매우 유용한 방법이다. 하지만 이를 위하여 인공적으로 표시를 하고 동시에 원하는 수중의 위치에 정확하게 이를 설치한다는 것은 수중건설작업 시 많은 경비와 시간을 요구하기 때문에 실제 현장에서 적용하기에는 적합하지 못한 해결책이다. Sac[8]은 작동주파수 900kHz인 이미징소나를 이용하여 수중에서 12m 떨어진 전방 대상물을 관찰 후 해당 대상물의 표면을 연속적으로 나타낼 수 있도록 시뮬레이션을 수행한 바 있다. 상대적으로 원거리를 관찰할 수 있는 900kHz 이미징소나를 활용하는 것은 적합한 선택이지만, 소나영상을 이용하여 사용자가 원하는 깨끗한 연속이미지를 얻기 위해서는 실시간으로 데이터 처리가 힘들어 시뮬레이션으로만 이미지 처리를 수행한 바 있다. Shin[2]은 수중장비가 탁도가 높은 수중에서 경계를 인식함에 있어 나일론줄을 활용할 것을 제안하였다. 나일론은 가볍고도 유연하며 또한 시중에서 매우 쉽게 확보할 수 있기 때문에 잠수사가 수중에서 가장 많이 다루는 장비 중의 하나이다. 하지만 이를 활용할 시 인지에 대한 한계, 및 이를 활용하기 위한 방안에 대한 연구는 매우 부족하다. 위와 같이 소나를 활용한 다양한 선행연구는 많이 있으나, 수중건설작업에 바로 적용할 수 있도록 하기 위하여 원거리 탐지가능, 탁도 조건에서도 대상물 인식을 인식, 건설현장에서 바로 적용하기 위한 경제성 및 작업효율성을 동시에 고려되는 소나의 활용방안에 대한 연구는 전무한 상태이다.
본 연구에서는 수중사석고르기 장비에 탑재되는 소나를 이용하여 경제적이면서도 효율적으로 수중작업장 경계를 표시하고 이를 인지할 수 있는 방법, 한계, 그리고 이를 활용할 수 있는 방안을 제안하였다.
2. 실험 장비 및 환경
본 실험을 위하여 Blueview사의 2D 멀티빔 이미징 소나 P900-90을 이용하였다. 해당 소나의 작동주파수는 900kHz, 시야각은 90°를 가진다. 소나의 빔 갯수는 512개이며 작동 가능 수심은 최대 1,000m, 공기 중 무게는 2.6kg이다[9]. 해당 소나는 2D 이미지를 제공하는데 마치 흑백사진처럼 음파의 반사강도를 이용하여 명암차이에 의한 대상물 이미지를 제공한다. 소나는 사진과는 달리 음파를 이용하기 때문에 그 영상이 매우 거칠고, 숙련자조차도 대상물 식별이 어려운 경우가 다수 있다. 이를 극복하기 위해서는 팬틸트를 사용하여 대상물을 다양한

Fig. 2. Sonar and pantilt installed zig

Fig. 3. South Sea Research Institute of KIOST (Captured at Google Earth)
각도로 관찰하고 소나 사용자가 대상물을 인식하는 것이 필요하다. 이에 Sidus사의 SS109HT 팬틸트를 사용하였다. 해당 팬틸트의 최대출력토크는 19Nm, 최대허용하중은 23kg으로 소나를 설치해도 작동에 무리가 없다[10]. 또한 팬틸트의 통신방식은 RS-485 시리얼통신을 이용하기 때문에 장거리에서 팬틸트 제어가 가능하다.
해당 소나와 팬틸트는 수중사석고르기장비에 장착되어 운영되는 것을 감안하여 Fig. 2와 같이 동일한 높이(1.9m)를 가지는 지그를 만들어 최상단에 소나, 바로 아래에 팬틸트, 그리고 하단에 지그를 조립하였다. Fig. 3은 Google Earth에서 캡쳐한 한국해양과학기술원 남해분원 사진으로 원형표시를 한 곳에서 실험을 수행하였다. 해당 지역은 평균 7 ~ 10m 내외의 수심을 가진다.
3. 수중 장애물 인식을 위한 실험
수중사석고르기장비가 현장에서 활용될 경우 장비전


Fig. 4. Prepared nylon rope (thickness of about 25mm and length of 10m)
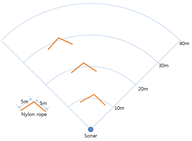
Fig. 5. Setting ranges between sonar and rope (10m, 20m, 30m)
용물건을 따로 준비하며 다니는 것은 현장인부들에게 있어 매우 불편한 일이다. 따라서 주위에서 쉽게 구할 수 있으며 또한 저렴한 가격으로 구할 수 있는 인식표를 준비하는 것이 필요하다.
Shin[2]은 물속에서 수중사석고르기장비를 이용하여 작업을 수행할 경우 작업장 경계면을 인식하기 위하여 나일론 줄을 이용하는 것을 제안한 바 있다. 따라서 본 실험에서도 나일론 줄을 활용하였다. Fig. 4와 같이 나일론줄을 엮어 두께 약 25mm, 길이 10m가 되도록 준비하였다. 나일론줄 두께 25mm를 선정한 이유는 소나의 거리분해능 성능이 1 inch(≒25.4mm)이기 때문이다. 분해능보다 두꺼운 나일론줄의 경우 대상물 인식이 원활할 것으로 판단되므로 분해능의 한계에 가깝게 선정하여 이에 대한 특성을 보고자 나일론줄 두께를 25mm로 선정하였다. 거리에 따른 나일론줄 인식여부를 판명하기 위하여 Fig. 5와 같이 소나와 나일론줄 사이의 거리를 실험변수로 선정하고 10m, 20m, 30m 간격으로 각 세팅하여 해저면에 설치 후 관찰하였다.
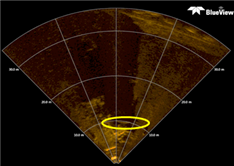
Fig. 6은 해저면에 설치된 나일론줄을 소나로 관찰한 이미지들이다. 10m, 20m에서는 나일론줄이 명확히 인식되었다. 10m의 경우 10m 길이의 나일론줄 전체가 인식되었다. 20m에 설치된 나일론 줄은 6m는 확인이 되는데 나머지 4m 관찰이 되지 않았다. 이러한 이유는 잠수
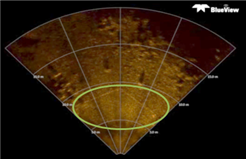
(a) Range of 10m
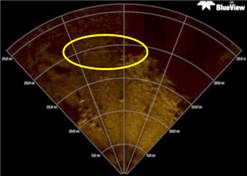
(b) Range of 20m
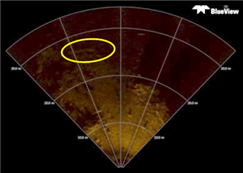
(c) Range of 30m
Fig. 6. Nylon rope detection
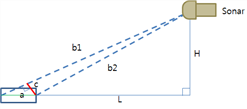
Fig. 7. Layout for calculation of rope detection
부의 증언으로 확인할 수 있었다. 나일론 줄을 설치한 장소 앞에 돌로 이루어진 언덕이 일부 존재하였으며 동시에 해조류 속에 설치되었다고 한다. 이로 인해하여 6m 길이의 로프만 확인될 수 있었다. 30m에 설치된 나일론 줄은 팬틸트를 이용하여 다각도로 나일론줄을 관찰하여야만 해당 줄이 희미하게나마 나타나 찰나의 순간으로 확인이 가능하였다. 4m는 확인할 수 있으나 나머지 6m는 관찰되지 않았다. 30m 지점에 설치된 경우 쉽게 관찰되지 않는 이유를 Fig. 7과 같이 레이아웃을 이용하여 고찰하였다. 나일론 줄의 두께(a) 0.025m, 소나와의 거리(L) 30m, 소나 설치 높이(H) 1.9m가 결정되어 있다. 피타고라스 정리에 의하여 b1, b2는 각각 30.09m, 30.06m이다. 이때 소나에서 보이는 줄의 두께는 c가 되며, 이를 계산하면 1.6mm가 된다. 즉 25mm 두께의 나일론 줄을 수중사석고르기장비의 소나 설치위치에서 바라보게 되면 약 15배 얇은 1.6mm 두께의 나일론줄로 보이게 된다. 이는 해저면에 설치된 25mm 두께의 나일론 줄을 관찰하는데 있어 소나성능의 한계에 가까운 것으로 판단되었다.
4. 수중사석고르기장비에 소나 설치 후
결과 비교
수중사석고르기장비는 해저면에 착저한 상태로 전진하여 전방에 놓인 사석들을 블래이드로 밀고나가며 고르기 작업을 수행한다. 전방에 놓여있는 사석들의 상태를 확인하며 작업을 수행하는 장비의 특성상 로 소나는 지속적으로 바닥면을 관찰하고 있어야 한다. 따라서 바닥면을 바라보고 있는 소나에서 작업장 경계를 알리기 위한 표식을 확인할 수 있어야 된다는 것을 의미한다. 이럴 경우, 앞서 3장에서 수행한 것과 같이 표식을 바닥면에 설치함으로서 작업경계 확인을 위한 불필요한 소나 움직임이 최소화하는 것이 합당하다고 판단된다.
Fig. 8과 같이 소나를 수중사석고르기장비에 설치하였다. 그리고 해저면 인식을 위한 표식으로서 나일론줄 해저면에 설치하고 이를 명확히 인식할 수 있는지 확인해보았다. Fig. 9와 같이 장비에 장착된 소나와 나일론줄 사이의 거리를 10m, 35m로 각각 설정하고 해저면에 설치 후 이를 관찰하였다.

Fig. 8. Installed sonar at underwater equipment for rubble mound leveling
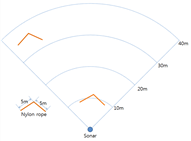
Fig. 9. Setting ranges between sonar and rope (10m, 35m)
(a) Range of 10m
(b) Range of 35m
Fig. 10. Nylon rope detection
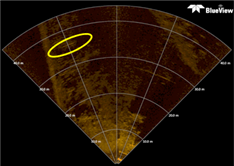
Fig. 10(a)는 소나로부터 10m 떨어진 위치에 설치된 나일론줄을 확인한 결과이다. 소나영상에서 거리 1~3m 지점에 밝은 색의 선이 관찰되는데 이것은 수중사석고르기장비의 다목적암과 버켓이다. 확인된 나일론줄은 소나영상 내 타원으로 표시한 부분에 나타나는 것을 확인하였다. Fig. 10(b)는 소나로부터 35m 떨어진 위치에 설치된 나일론줄을 확인한 결과이다. 실험계획에 의하면 30m 전방에 나일론 줄을 설치하도록 예정하였으나, 다이버에 의하여 실제 설치된 위치는 소나 전방 35m로 확인되었다. 3장에서 언급한 것과 같이 35m에 설치된 나일론줄의 경우 이를 인식하는 것이 쉽지 않았다. Fig. 10(b)에서는 나일론줄이 확인되고 있지만, 대상물을 인식하기 위하여 장비가 정지된 상태에서 해당 나일론줄을 탐지하기 위하여 팬틸트를 이용하여 10분 이상 다각도로 관찰하였고, 매우 짧은 시간 잠시 나타난 뒤 다시 사라졌다. 이때 탐지된 나일론줄 길이는 3m 이하로 확인되었다. 이것은 개발장비를 이용하여 수중작업을 수행 시 작업장 경계로 표시된 나일론줄 인식을 30m 이상에 있을 경우 매우 어렵다는 의미한다. 이를 바탕으로 개발장비를 수중작업 시 안전하게 이용하기 위해서는 전방의 작업장 경계표식을 먼저 확인 후 이상 없을 경우 전진 시작, 20m 전진 후 일시 정지, 소나영상을 통하여 다시 작업장 경계표시 인식을 절차를 반복하여 수행하면 될 것으로 판단된다.
5. 결론
본 연구에서는 2D 멀티빔 이미징 소나를 수중사석고르기장비에 탑재하여 수중작업장 경계면을 인식할 수 있는 방안을 실험 및 검증하였다. 이에 대한 결론은 아래와 같다.
(1) 수중사석고르기장비에 설치되어 사용될 소나가 해저면에 설치된 25mm두께의 나일론줄을 탐지할 수 있는 거리는 30m 이하이다.
(2) 수중사석고르기장비를 이용하여 수중작업을 수행 시 작업 경계면을 인식하며 안전하게 작업을 하기 위한 절차는
① 소나를 이용하여 전방의 작업장 경계표식 유무 확인
② 이상 없을 경우 전진시작
③ 20m 전진 후 일시 정지를 반복하는 것이다..
본 연구를 통하여 정리된 작업 경계면 인식 절차를 활용한다면 수중사석고르기장비 외 추후에 개발될 착저형 수중작업용 장비의 작업절차에 광범위하게 적용할 수 있을 것으로 판단된다. 이를 통하여 수중건설 관련 기계화 산업에 도움을 줄 수 있을 것이다.
References
[1] In Sung Jang, Changjoo Shin, Kihun Kim and Won Dae Baek, "Development of Underwater Equipment for Rubble Mound Leveling of Port Construction Works", Proceeding of Autumn Conference on Korean Unmanned Underwater Vehicle, pp. 27-32, Nov. 2012.
[2] Changjoo Shin, In-Sung Jang, Kihun Kim, Hyun-Tack Choi and Won Dae Baek, "Performance Analysis of Sonar System Applicable to Underwater Construction Sites with High Turbidity", Journal of the Korea Academia-Industrial cooperation Society, vol. 14, no. 9, pp. 4507-4513, 2013.
DOI: http://dx.doi.org/10.5762/KAIS.2013.14.9.4507
[3] A. J. Bacharach, "A Short History of Man in the Sea", The Physiology and Medicine of Diving, 3rd Ed., London, pp. 1-14, 1982.
[4] 박정식, 해군잠수의 역할과 잠수 교육훈련체계 발전방향, 한국해양대학교 대학원 석사 논문, p.47, 2008.
[5] Sin-Young Kang, "A Study on the Diving Standard for Underwater Work in Hostile Environment", Journal of the Korean Society of Marine Engineering, vol. 34, no. 5, pp. 735-742, 2010.
DOI: http://dx.doi.org/10.5916/jkosme.2010.34.5.735
[6] Sarah Frias-Torres, Jiangang Luo, "Using dual-frequency sonar to detect juvenile goliath grouper Epinephelus itajara in mangrove habitat", Endangered Species Research, vol. 7, pp. 237-242, 2009.
DOI: http://dx.doi.org/10.3354/esr00138
[7] Yeongjun Lee, Jihong Lee, Hyun-Taek Choi, "A Framework of Recognition and Tracking for Underwater Objects based on Sonar Images : Part 1. Design and Recognition of Artificial Landmark considering Characteristics of Sonar Images", Journal of the Institute of Electronics and Information Engineers, vol. 51, no. 2, pp. 182-189, 2014.
DOI: http://dx.doi.org/10.5573/ieie.2014.51.2.182
[8] Hakan SAC, Kemal LEBLEBICIOGLU, Gozde BOZDAGI AKAR, "2D high-frequency forward-looking sonar simulator based on continuous surfaces approach", Turkish Journal of Electronical Engineering & Computer Sciences, vol. 23, pp. 2289-2303, 2015.
DOI: http://dx.doi.org/10.3906/elk-1305-188
[9] http://www.blueview.com/products/2d-imaging-so
nar/pseries-archives/p900-series/
[10] http://www.sidus-solutions.com/product/ss109ht-high- performance-pan-tilt-device/
|
신 창 주(Changjoo Shin) [정회원] |
|
|
|
•2006년 2월 : 부산대학교 기계공학부 (공학사) •2012년 2월 : 부산대학교 기계공학부 (공학석·박사) •2012년 6월 ~ 현재 : 한국해양과학기술원 재직 |
|
<관심분야> 수중로봇, 센서융합, 소음진동 |
|
|
장 인 성(In-Sung Jang) [정회원] |
|
|
|
•1995년 2월 : 서울대학교 공과대학 토목공학과 (공학석사) •2001년 2월 : 서울대학교 공과대학 토목공학과 (공학박사) •2001년 3월 ~ 2002년 12월 : 한국해양과학기술원 연수연구원 •2001년 3월 ~ 현재 : 한국해양과학기술원 재직 |
|
<관심분야> 지반공학, 지반조사, 해양구조물, 수중시공장비 |
|
|
원 덕 희(Deokhee Won) [정회원] |
|
|
|
•2008년 8월 : 고려대학교 사회환경시스템공학과 (구조공학석사) •2011년 8월 : 고려대학교 건축사회환경공학과 (구조공학박사) •2011년 9월 ~ 2012년 6월 : 고려대학교 연구교수 •2012년 6월 ~ 현재 : 한국해양과학기술원 재직 |
|
<관심분야> 강구조 및 합성구조, 해양구조, 구조해석 |
|
|
서 정 민(Seo Jung-min) [정회원] |
|
|
|
•2011년 8월 : 한국해양대학교 공과대학 기계시스템공학과(공학사) •2014년 2월 : 한국해양대학교 공과대학 기계공학과 (공학석사) •2014년 3월 ~ 현재 : 한국해양과학기술원 재직 |
|
<관심분야> 2D/3D CAD, 수중운동체 설계/제작(AUV,ROV) |
|
|
백 원 대(Won-Dae Baek) [정회원] |
|
|
|
•2006년 9월 : 안산공과대 토목공학과 •1980년 3월 ~ 1983년 11월 : 한국해양개발연구소 •1985년 1월 ~ 현재 : 한국해양과학기술원 재직 |
|
<관심분야> 해양구조물, 수중시공장비 |
|
|
김 기 훈(Kihun Kim) [정회원] |
|
|
|
•1998년 2월 : 서울대학교 조선해양공학과 (학사) •2000년 2월 : 서울대학교 조선해양공학과 (석사) •2005년 2월 : 서울대학교 조선해양공학과 (박사) •2005년 10월 ~ 현재 : 한국해양과학기술원 선임연구원 |
|
<관심분야> 수중로봇, 수중항법, 수중인지 |
|
|
김 종 훈(KIM JONG HOON) [정회원] |
|
|
|
•1995년 2월 : 강원대학교 자원공학 (공학사) •1997년 2월 : 강원대학교 자원공학 (공학석사) •2002년 8월 : 강원대학교 지구시스템공학 (공학박사) •2002년 9월 ~ 현재 : (주)희송지오텍 상무이사 |
|
<관심분야> 토질역학, 지반조사, 수중시공 |
|






